Method
We extend single-agent empowerment to multi-agent systems by modeling coupled dynamics as a multi-user interference channel. Each agent treats the actions of others as structured noise and solves for its optimal strategy via iterative water-filling (IWF), reaching a Nash equilibrium without explicit coordination.
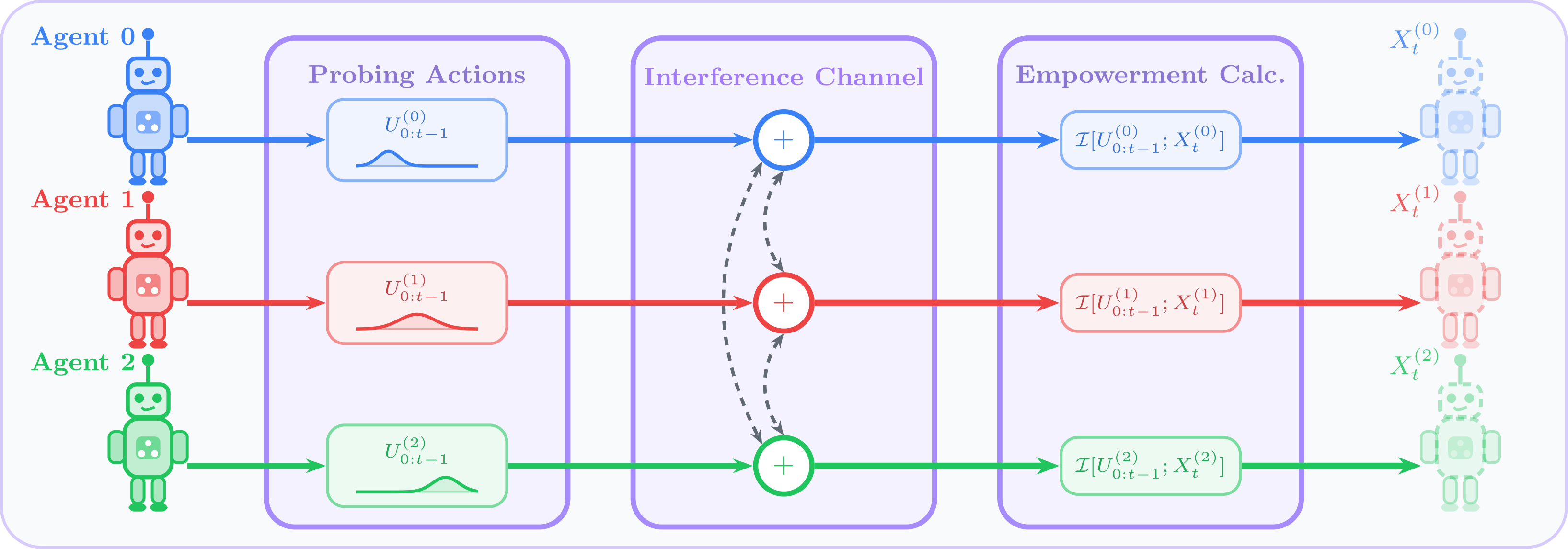
Figure 1. Multi-agent system as an interference channel with N=3 agents. Each agent attempts to transmit its action sequence through the noisy channel to communicate with its future state. The interference generated by other agents affects each agent's channel capacity.
Linearize Dynamics
Compute the block-Jacobian sensitivity matrix Ft along the autonomous trajectory for all agent pairs.
Iterative Water-Filling
Each agent treats others as interference noise and updates its probing covariance iteratively until the Nash equilibrium is reached.
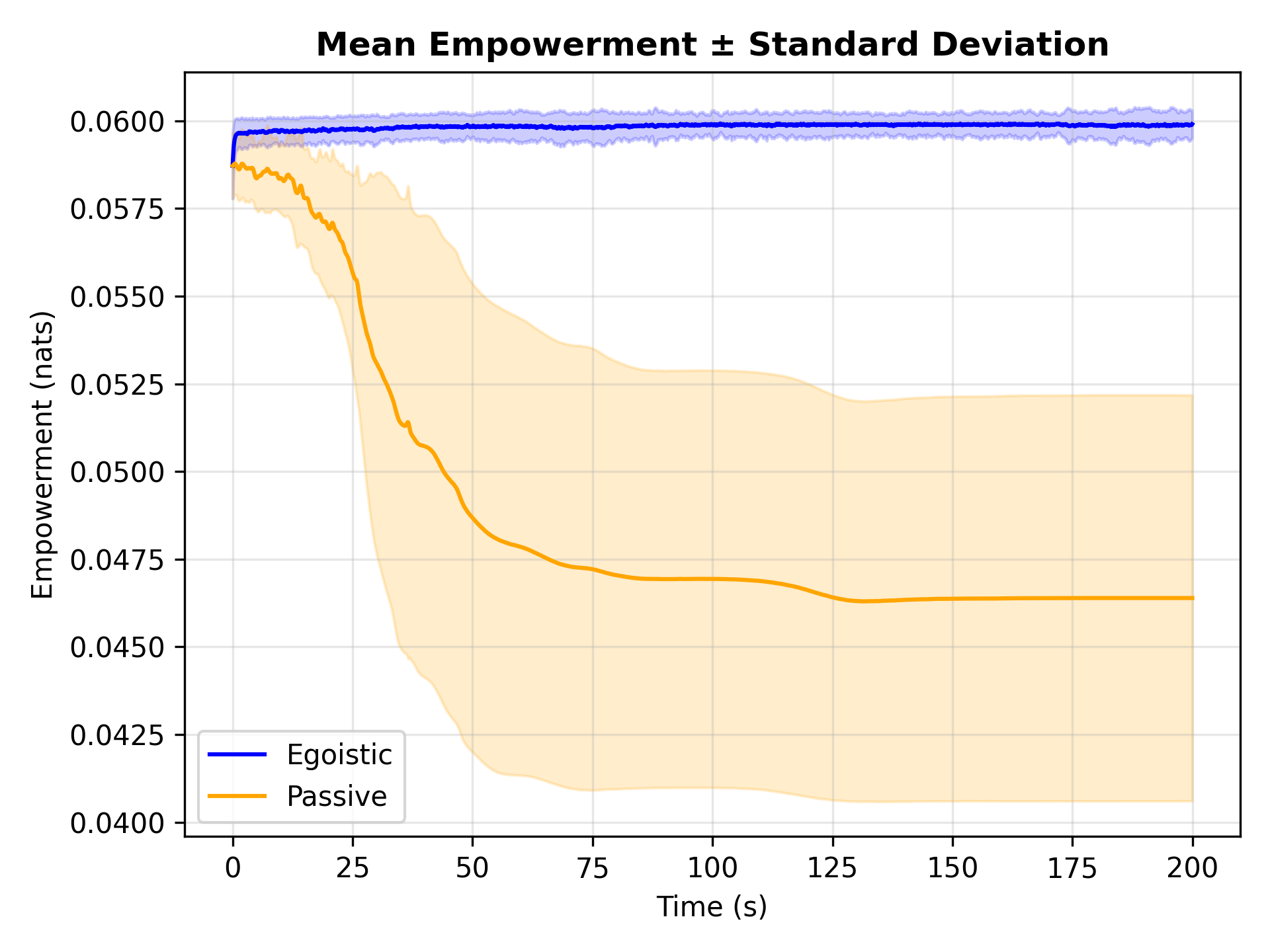
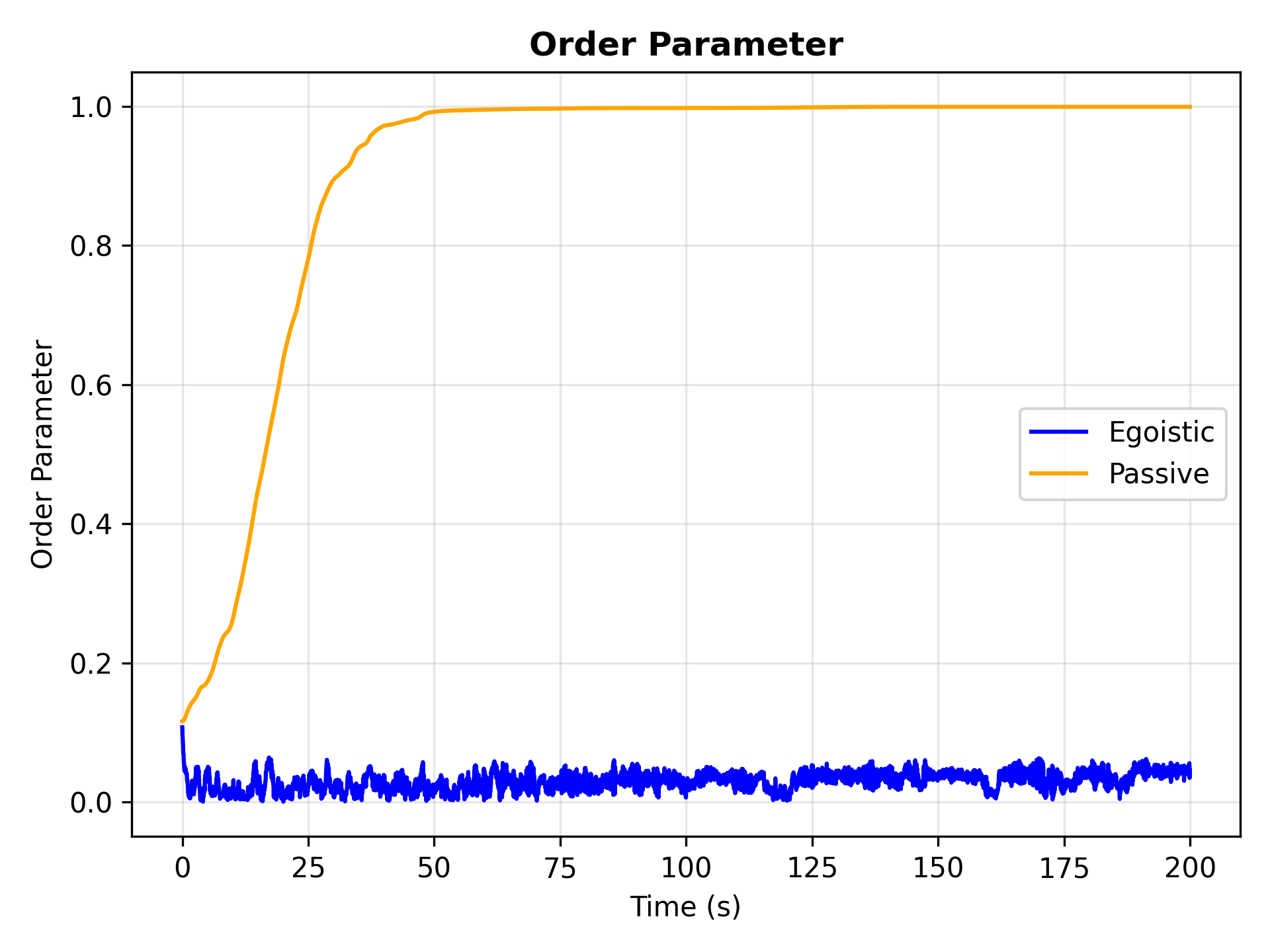
Empowerment-Driven Control
Agents select actions that maximize their own empowerment (egoistic) or another agent's empowerment (altruistic) at every timestep.